概要
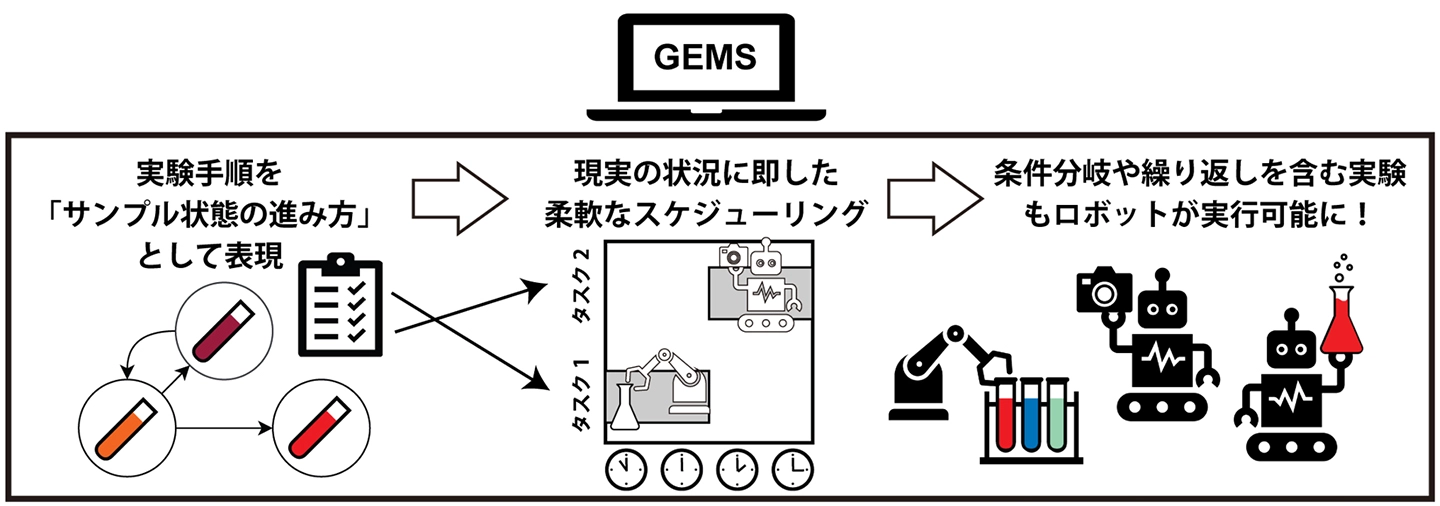
東京科学大学 総合研究院 難治疾患研究所 ロボット科学分野の神田元紀教授、理化学研究所(理研) 生命機能科学研究センター AI生物学研究チームの尾崎遼チームディレクター、筑波大学 ヒューマニクス学位プログラムの田原(新井)悠也大学院生(理研 生命機能科学研究センター AI生物学研究チーム研修生)らの共同研究グループは、実験科学において従来は自然言語で記述されてきた実験手順[用語1]を、「実験が進むとサンプルの状態[用語2]がどのように変化するか」という観点で整理し、実験中の観測・操作結果に応じて「今の状態で行う実験操作」と「次に遷移するサンプル状態」を自動的に選択しながら実験を自律運用するソフトウエア基盤「GEMS(General Experimental Management System)」を開発しました。
自動装置やロボットをGEMSの導入により連携させることで、条件分岐や繰り返しを含む実験でも自律的な実験運用が可能となると期待されます。
近年、実験自動化は多くの分野で実現しつつあります。しかし、長期間の自律運用を実現するためには、固定した手順を順番に実行するだけではなく、途中データを参照して手順変更や反復、装置都合による予定変更への対応が必要です。
本研究では、実験手順を情報科学の数理モデル「決定性有限オートマトン(DFA)[用語3]」に基づいて捉え直しました。DFAの枠組みを導入したGEMSは、実験操作を決める規則と、実験装置の使用予定(いつ・どの装置で実行するか)を分けて扱うことで、分岐・反復を含む手順設計と予定調整を容易にします。
本研究は、科学雑誌『Digital Discovery 』オンライン版に3月10日付で公開され、印刷版の3月18日号に掲載されます。
背景
ロボットや計測機器、画像解析などの発展により、ライフサイエンスや化学・材料分野では、実験の自動化が実現しつつあります。しかし、多くの実験自動化システムは、実験環境やサンプルの状態の変化にかかわらず決められた手順を順番に実行することを前提としています。そのため、実験途中の環境や試料の変化、途中操作の成功や失敗に応じて実験の順番やタイミング、実験操作の内容を変更することは困難であり、研究者が日常的に行っている下記のような「状況に応じた判断」には人が対応しなければならない場面が多く残っていました。
- 寒天培地を溶かすために2分間レンジで温めたが、完全に溶けていなかったのでもう1分加熱した
- 細胞の増え方に合わせて培地交換や継代(細胞の一部を別の培地に移すこと)のタイミングを柔軟に変えた
- 使う予定の装置が故障していたので、別の装置を予約し直した
一方、情報科学の分野で古くから研究されている「決定性有限オートマトン(DFA)」は、入力に応じて状態が切り替わる仕組みを数学的に扱います。外部から得られる入力(観測・操作結果)に基づいて、機械が「今の状態で何をするか」と「次にどの状態へ進むか」を、状態機械[用語4]としてあらかじめ定められた規則で一意的に決定します。ここでいう状態とは、例えば「培地交換のための待機状態」「継代操作が可能になった状態」「追加測定が必要な状態」といった、サンプルが置かれている実験の段階を表します。
共同研究グループは、「実験手順」も入力(観測・操作結果)に応じて状態が変わる状態機械と見なすことで、従来のように人間が途中で手順を選び直すのではなく、観測・操作結果に基づく分岐や反復を含めて情報科学の枠組みであるDFAを科学実験の世界にそのまま持ち込めるのではないかと考えました(図1)。
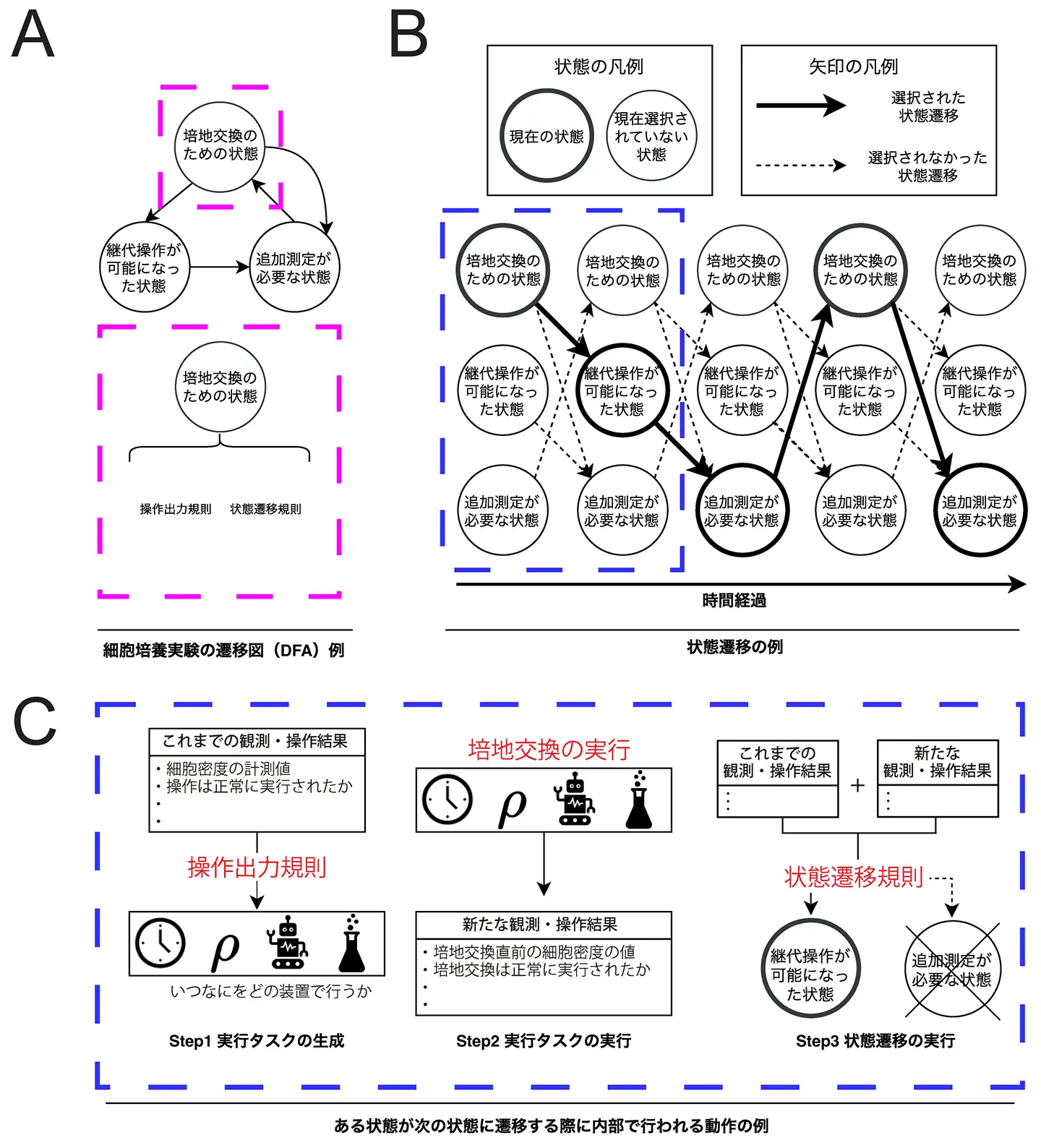
A)一般的な細胞培養の実験手順では、培養日数や細胞密度に応じて培地交換・継代操作を行うタイミングが自然言語で記述される。この手順をDFAの考え方で整理すると、サンプル(細胞)が、「培地交換のための状態」「継代操作が可能になった状態」「追加測定が必要な状態」という3状態を矢印の向きに遷移していく過程と表現できる。それぞれの状態で「今の状態で何をするか」と「次にどの状態へ進むか」は、実行規則(操作出力規則および状態遷移規則)に従って決定される。
B)細胞培養実験における状態遷移の例。三つの細胞の状態(「培地交換のための状態」「継代操作が可能になった状態」「追加測定が必要な状態」)のいずれかが選択され、その状態で実行される観測・操作結果により次に遷移する状態が決定される。同じ操作を繰り返す場合も、手順を戻すのではなく、時系列に沿って進む状態遷移の連続として扱うことができる。
C)B図の青破線で囲んだ状態遷移の過程で行われる情報処理と実行動作の例。
Step1:これまでの観測・操作結果を参照し、「培地交換のための状態」での操作出力規則に従って、今の状態でいつ何をするか(実行タスク)が生成される(11時間後に顕微鏡観察など)。
Step2:実行タスクを実際に実行し、新しい観測・操作結果を得る。
Step3:これまでの観測・操作結果と、新しい観測・操作結果を参照し、状態遷移規則に従って、サンプルが「継代操作が可能になった状態」に遷移する。
研究手法と成果
開発したソフトウエア基盤「GEMS(General Experimental Management System)」は、DFAの考え方に基づいて、科学実験を「サンプルの状態がどのように進むか」という観点で表現します。科学研究で行われるさまざまな実験手順は、状態と実行規則[用語5]を明確にDFAとして表現できます。そこでGEMSでは科学実験を、「サンプルの状態」「実験操作」「観測・操作結果」「実行規則」の四つの要素に分ける構造としました。この構造により、GEMSはDFAの考え方に基づいて、現在のサンプルの観測・操作結果に応じて次に遷移する状態(引き続き観測が必要な状態か、次の実験操作に進める状態かなど)を決定し、実験手順を更新することができます。さらに、実行規則により実験操作を決めた上で、各操作を実行タスク[用語6]として扱い、装置の空きや制約に合わせて、装置の使用予定[用語7]を自動で組み直す仕組み(ペナルティ[用語8]に基づいて装置の使用予定を自動で作成する仕組み)としました(図2)。
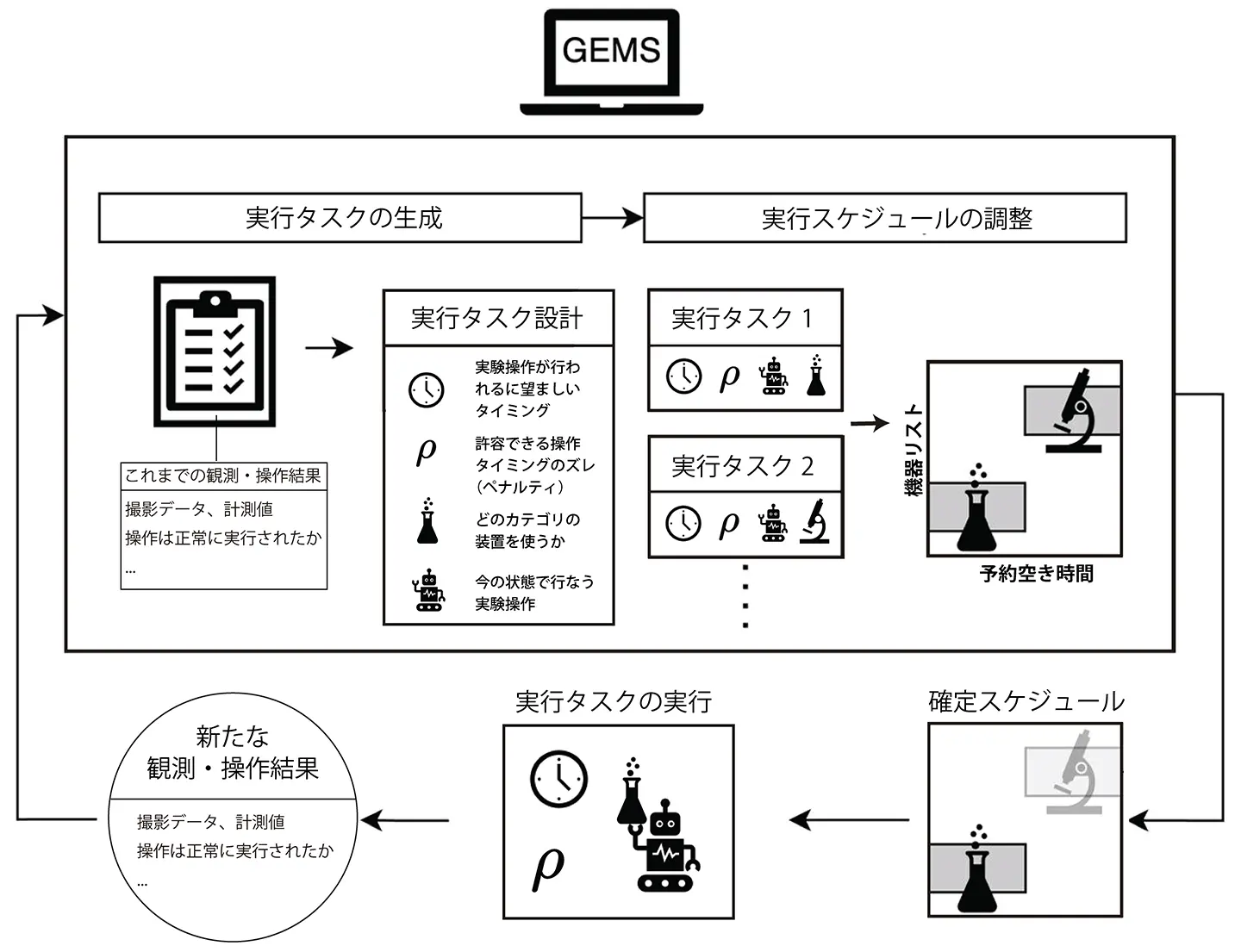
従来の実験自動化システムの多くは、「決められた手順を順番に実行する」ことを前提として実験操作の自動化を実現している。今回提案したGEMSでは、実験を「サンプル(試料)の状態がどのように進むか」という観点で表現し、観測・操作結果に応じて今の状態で行う実験操作と次に遷移する状態を決める仕組みを導入した。これにより、分岐・反復を含む手順の設計や実装、検証を行いやすくなる。また、実行規則と装置の使用予定(いつ・どの装置で実行するか)を分けて扱うことで、装置都合に応じた予定の組み替えにも対応する。
本研究では、GEMSが事前に定義した状態と実行規則に従って、観測・操作結果に基づく分岐・反復や、装置トラブルによる予定変更が起きても実験運用を継続できるかを検証するため、2種類の模擬実験を行いました。
模擬実験1:液体混合の自動最適化(化学・工学的実験)
GEMSによって自動分注機と液体試料の撮影とベイズ最適化[用語9]を連携させ、混合比を更新しながら液体の色を目標に近づける自律運用(自動最適化)を行いました。その結果、3回の反復で目標色との近さを示す指標が改善し、最終ラウンドでは初期(ランダム)の最良条件に対して約30%の改善を達成しました。またGEMSは、提案から実行、画像処理、採点、次の条件生成までの1サイクルを60分以内で実行できることを示しました(図3)。
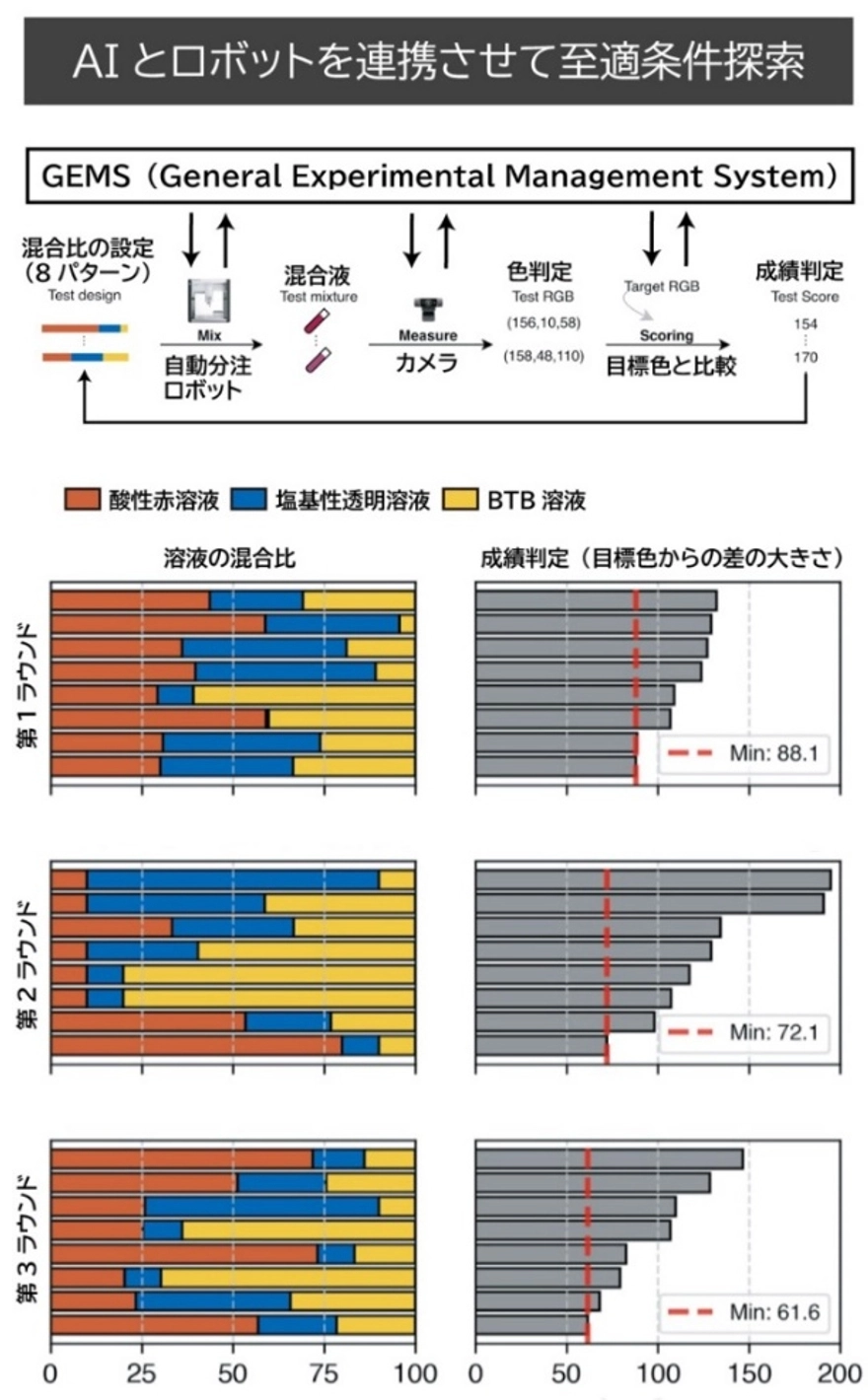
「複数の溶液を混合して目的の試薬をつくる」ことを想定した自律運用(自動最適化)。ここでは、酸性赤溶液、塩基性透明溶液、水素イオン指数(pH)で色が変化するBTB溶液の三つを混合し、目的の色の液体を作製することとした。
上)自律運用の模式図。1回の実験で8パターンの混合液の色を解析し、目標とした色との差を解析した。GEMSは、「サンプルの状態(液色)」「行う実験操作(混合)」「観測(撮影)」「実行規則(目標色との差に基づき次の状態とその状態での実験操作を決める)」を分けて扱うことで、混合比の至適条件を自律的に探索する。
下)混合実験を3回試行させた結果。左グラフは溶液の混合比を示し、右は各条件(4連well)のスコアを平均した値(平均スコア)を小さい順に並べたものである。平均スコアは目標色との差を表し、数値が低いほど目標色に近い。各ラウンドで最も目標色に近かった条件の最小平均スコア(Min)を比較すると、1回目(88.1)から3回目(61.6)へ低下し、約30%改善した。
模擬実験2:複数細胞株の長期培養の自律運用(生物学的実験)
自律動作可能なロボット設備を用い、画像から推定した細胞密度に基づいてGEMSが培地交換・継代・サンプル採取のタイミングを決め、増殖速度の異なる2種類の細胞の培養を並行して運用できるかを試しました。その過程で、培養中に新しい培養系列(同じ細胞株を別々のプレートで独立に培養した単位)を追加しても、GEMSが予定を組み直して運用を継続できることを確認しました。さらに、装置トラブルにより一部の培養系列が失われた場合でも、対象系列を除外することで残りの予定を更新し、運用を続けられることを示しました(図4)。
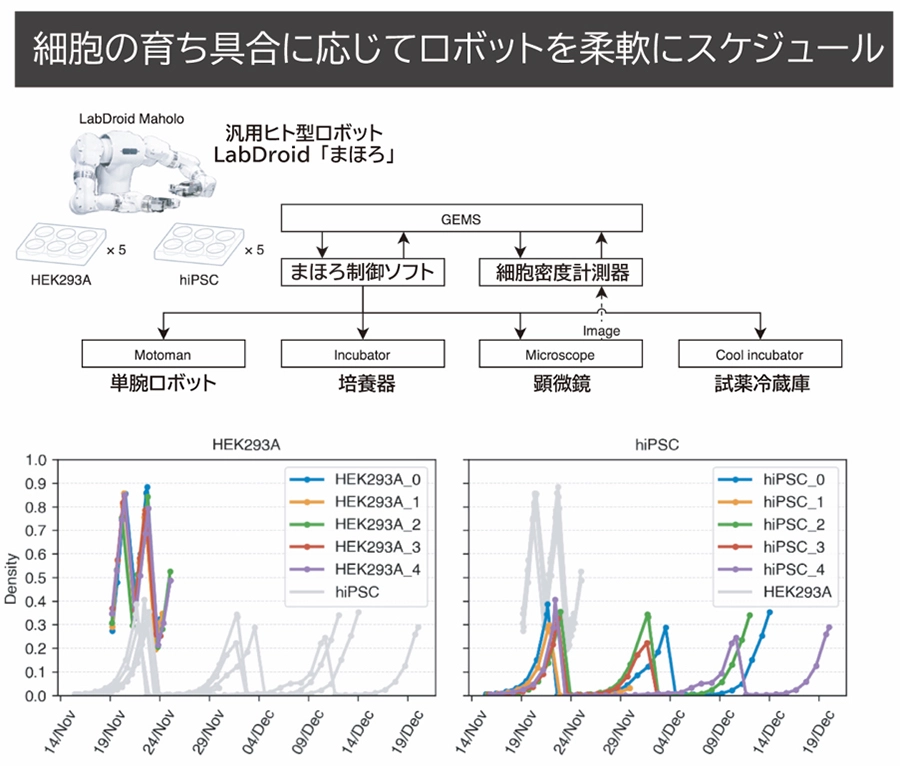
上)自律運用の模式図。ピペット操作や細胞培養器の扉の開け閉めなど人間と同じ動作が可能なロボット「まほろ」が主な実験操作を担い、まほろと周辺機器をGEMSが管理する。培養する細胞株はヒト胎児腎細胞(HEK293A)およびヒトiPS細胞(hiPSC)とし、6穴の細胞培養プレート各5枚を用いて培養した(1枚のプレートが一つの培養系列に相当)。
下)実際の培養状況を細胞密度の時間経過で示したグラフ。HEK293AとhiPSCに分けて記載した。最初にhiPSCの5系列の培養を2024年11月14日に開始した後、同18日にHEK293Aを5系列追加した。HEK293AとhiPSCの継代間隔は全く異なるが、GEMSは予定を組み直して対応した。またhiPSCの2系列(1と3)は培養器のトラブルにより途中で死滅してしまったが、GEMSはこの系列を除外し残りの予定を更新し、運用を継続した。
以上より、GEMSが性質の異なる二つの実験(混合比探索と長期培養)を同じ枠組みで扱えることを確認し、提案手法と実装の適用範囲が広いことを示しました。
今後の期待
本研究は、科学実験で頻繁に行われる分岐や反復を含む実験手順を「状態」と「状態遷移」として整理し、サンプルの観測結果に応じて実験操作を切り替える規則を、状態遷移図やプログラムとして明確に記述できることを示しました。これにより、分岐や繰り返しを含む手順でも、どの条件で何をするかを整理した上で設計でき、途中の手順変更や例外対応も自律運用に組み込みやすくなります。
またGEMSで取り入れたDFAの考え方は、情報科学で古くから研究されてきた枠組みであり、仕様の検証や表現の整理、設計の比較といった知見を、実験自動化の設計へ取り込みやすくなります。
今後は、状態遷移の作成を支援する編集環境(図で状態と実行規則を記述できる仕組みなど)や、より多様な装置・実験への適用を進めることで、長期間・多条件の自律運用をより現場で使いやすい形にしていくことが期待されます。
論文情報
- 掲載誌:
- Digital Discovery
- タイトル:
- GEMS: A deterministic finite automaton framework for adaptive laboratory automation
- 著者:
- Yuya Tahara-Arai, Akari Kato, Koji Ochiai, Kazuya Azumi, Koichi Takahashi, Genki N. Kanda, Haruka Ozaki
- DOI:
- 10.1039/d5dd00409h
用語説明
- [用語1]
- 実験手順:従来、自然言語で記述されてきた手順書(実験手順書)に書かれている内容を指す。一般に、複数の実験操作(分注、混合、培地交換、継代、撮影、サンプル採取など)と、それらを行う順序や条件、分岐、反復が含まれる。
- [用語2]
- 状態:本研究では、サンプルが置かれている実験の段階(例:培地交換のための待機状態、継代が可能になった状態、追加測定が必要な状態など)を表す単位。各状態は、現在置かれている状態(必要に応じてその状態での観測結果も含む)に基づいて今の状態で行う実行タスクを定める「操作出力規則」と、現在置かれている状態と観測結果に基づいて次状態を定める(次の状態に遷移する)「状態遷移規則」を持つ。操作出力規則はこれまでの観測結果に基づいて実行タスクを生成する。状態遷移規則はこれまでの観測結果に基づいて次に遷移する状態(次状態)を決定する。
- [用語3]
- 決定性有限オートマトン(DFA):有限個の状態と、入力に応じた規則によって振る舞いが定まる抽象的な計算モデル(オートマトン)。決定性とは、ある状態と入力が与えられたとき、次に遷移する状態が一意に決まること。本研究では、実験手順を「状態」と「実行規則([用語5]参照)」で表現し、観測結果を入力として実験を自律運用する枠組みとして用いている。なお厳密には、GEMSは状態と入力に応じて、遷移と同時に出力も定めており、このようなオートマトンは情報学的にはDFAの発展形であるMealy machineと呼ばれる。本研究では、入力が観測結果に、出力が実行すべき実験操作(または操作列)に対応する。
- [用語4]
- 状態機械:いくつかの「状態」と「状態遷移」で構成され、状態はあるアクションを実行することで、遷移はある状態から別の状態への移動のこと。状態機械は、状態間の遷移規則を用いて問題を解く仕組みの一つ。何か具体的な機械があるのではなく、抽象的な構造のことを指す。
- [用語5]
- 実行規則:観測結果に応じて、今の状態で行う実行タスクと次状態を一意に決める規則の総称。操作出力規則と状態遷移規則を合わせて実行規則と呼ぶ。
- [用語6]
- 実行タスク:あるサンプルに対して行う1回分の実験操作を、(i)望ましい実行タイミング(ペナルティ([用語8]参照)で表現)、(ii)実行可能な装置(候補装置)とセットで表した単位。装置の使用予定(スケジュール)は、複数の実行タスクを装置と時刻に割り当てた結果である。
- [用語7]
- 装置の使用予定:「いつ・どの装置で実験操作を実行するか」という予定を指す。GEMSでは、実行規則と装置の使用予定(いつ・どの装置で行うか)を分けて扱う。
- [用語8]
- ペナルティ:「実験操作が行われるのに望ましいタイミング」から外れた度合いを数値化した指標。装置の空き状況や制約の下で装置の使用予定(スケジュール)を作成・組み直す際の基準として用いられる。
- [用語9]
- ベイズ最適化:ベイズ最適化はこれまでの実験結果を基に、良いと予測される条件(活用)とまだ実験していない未知の条件(探索)をバランスよく選ぶアルゴリズム。形状が不明な関数(ブラックボックス関数)の最大値や最小値を求めるために用いられる。
共同研究グループ
理化学研究所
-
生命機能科学研究センター
-
AI生物学研究チーム
チームディレクター:尾崎 遼(オザキ ハルカ) -
バイオコンピューティング研究チーム
研究員:落合 幸治(オチアイ コウジ)
テクニカルスタッフI:阿住 和哉(アズミ カズヤ)
チームディレクター:高橋 恒一(タカハシ コウイチ)
-
AI生物学研究チーム
-
最先端研究プラットフォーム連携(TRIP)事業本部
-
統合データ・計算科学プログラム 研究DX基盤開発チーム
専門技術員:加藤 月(カトウ アカリ)
-
統合データ・計算科学プログラム 研究DX基盤開発チーム
筑波大学 ヒューマニクス学位プログラム
-
大学院生:田原(新井)悠也(タハラ(アライ)ユウヤ)
(理研生命機能科学研究センターAI生物学研究チーム研修生)
東京科学大学 総合研究院 難治疾患研究所 ロボット科学分野
-
東京科学大学 総合研究院 難治疾患研究所 ロボット科学分野
教授:神田 元紀(カンダ ゲンキ)
研究支援
本研究は、理化学研究所運営費交付金(生命機能科学研究)をはじめとする共同研究グループの各機関内の研究費で実施されるとともに、科学技術振興機構(JST)未来社会創造事業探索加速型「ロボティックバイオロジーによる生命科学の加速(研究代表者:高橋恒一、JPMJMI18G4、JPMJMI20G7)」、同戦略的創造研究推進事業CREST「AIが創薬研究をするための『生きている研究室』の開発(研究代表者:神田元紀、JPMJCR2551)」、同国家戦略分野の若手研究者及び博士後期課程学生の育成事業(BOOST)次世代AI人材育成プログラム(博士後期課程学生支援)(筑波大学、JPMJBS2414)、日本学術振興会(JSPS)科学研究費助成事業若手研究「敵対的生成ネットワークによる自在な発現特異性を有するプロモータ塩基配列の設計(研究代表者:尾崎遼、JP22K17992)」、同学術変革領域研究(A)「グリアブラストによる機能未知グリア細胞の機能予測(研究代表者:尾崎遼、JP23H04149)」、同特別研究員奨励費「細胞培養手技と評価の定量化によるiPS細胞自律培養システムの開発(研究代表者:加藤月、JP22KJ3148)」、同基盤研究(C)「非破壊情報を用いたオルガノイドの最終品質予測(研究代表者:神田元紀、JP23K11820)」による助成を受けて行われました。
発表者のコメント
実験自動化の文脈では、ロボットに実験を実行させることを前提としているため、実験を「事前に定義した実験操作(または操作列)」として記述することが多く、それが自然となっています。一方で通常の実験室の実験手順書には、実験操作だけでなく、観測に基づく実験操作の調整方法や、次の実験手順の選択条件も明示的・黙示的を問わず記述されています。
そこで私たちは、実験を「状態」と「状態遷移」として整理し、Mealy machineの考え方で扱える形にしました。この整理は実験の種類によらず成り立つため、分野をまたいだ自動運用にもつながると考えています。これにより、情報学分野で古くから研究されてきたMealy machineを、現代の実験自動化と結び付け、過去の研究知見を活用できる可能性を見いだしました。(田原(新井)悠也)