概要

東京科学大学総合研究院難治疾患研究所ロボット科学分野の神田元紀教授は、理化学研究所(理研)生命機能科学研究センターバイオコンピューティング研究チームの落合幸治研究員、高橋恒一チームディレクター、AI生物学研究チームの尾崎遼チームディレクター、筑波大学ヒューマニクス学位プログラムの田原(新井)悠也大学院生、梅馨堂合同会社の梅野真代表社員らの研究グループと共同で、細胞が恒常性を維持する機能をヒントに、実験室(ラボ)全体を一つの統合システムと見なし、自らの状態を把握して維持する「Self-maintainability(SeM、セム)[用語1]」という新たな概念と、SeM対応ラボ(SeM-enabled laboratory)という新たな設計思想を提案しました。
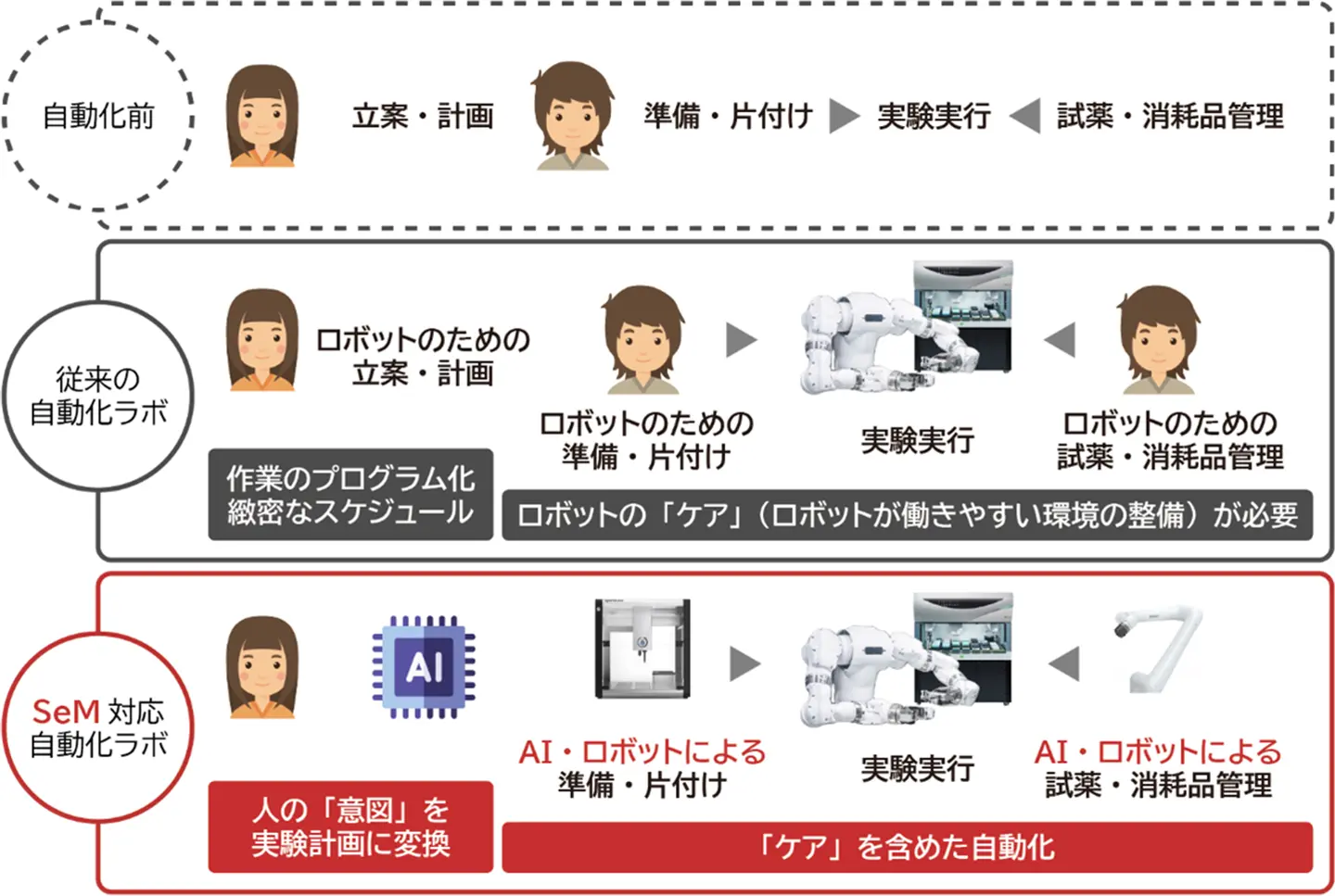
近年、生命科学や化学などの実験科学において、ロボットや機器装置が実験操作を行う実験自動化(ラボラトリーオートメーション)が急速に進んでいます。しかし現状では、ロボット用の実験手順を作成したり、試薬や消耗品を適切なタイミングで補充したりするなどの“裏方作業”(以下、ケア[用語2]と呼ぶ)は相変わらず人間に依存しています。これらのケアの解決が、完全な自動化ラボの実現に残された最後の課題となっています。
今回提案したSeM対応ラボは、実験手順の作成・資源管理・トラブル対応など、自動実験を行うために人間が行ってきたケアを、ラボ自体が担えるようになることを目指す設計思想です。生命科学や化学をはじめとする多様な分野で完全自動化研究を加速させる基盤技術の開発につながると期待されます。
本研究は、科学雑誌『Digital Discovery』(8月27日号)の掲載に先立ち、オンライン版(8月19日付:日本時間8月19日)に掲載されます。本研究成果を元に制作されたイラストが、同号の表紙を飾ります。
背景
近年、生命科学や化学における実験の自動化(ラボラトリーオートメーション)は大きく進みつつあります。自動分注機[用語3]やロボットアームにより実験操作自体は自動化されつつあり、また人工知能(AI)[用語4]などの導入により、手動では達成できないような大規模実験・大量解析の自動化が著しく進歩しました[注]。しかし、研究者が考案した実験を自動実験室が機器の動作に落とし込み実行するような完全自動化はいまだに達成されていません。
その理由として、人の代わりにロボットが実験をしても、ロボットの世話をするのは人であるという問題があります。例えば、抽象的な実験手順を参考にその時の実験室の状態に合わせた実験機器装置の命令を作成する作業や、試薬や消耗品を適切なタイミングで補充し、センサー異常といった予期せぬエラーに対処するなど自動実験のケアは、いまだに熟練の技術者や研究者に依存しています。
こうした負担は、複数の実験を並行して行う際のサンプル数や処理速度の上限を決める律速段階(実験過程全体の速度を決める段階)となり、複雑で長期的な実験ほど自動化効果が頭打ちになります。さらに、ケアを場当たり的に追加機構によって補う従来方式は、実験ごとにシステムを改造する「つぎはぎ」状態を招き、拡張性を損なうという課題があります。
これまでの「自律実験システム」に関する研究により、「実験操作の自動化」についてはめどが立ってきました。今後は、試薬管理やエラー対応、装置メンテナンスといった運用レベルのケアまでも包括的に設計に組み込んだ自動化ラボの全体像を描く段階になったといえます。
- [注]
- 2022年6月28日プレスリリース「再生医療用細胞レシピをロボットとAIが自律的に試行錯誤|理化学研究所」
研究手法と成果
共同研究グループは、AI・ロボット時代にふさわしい自動化ラボのあるべき姿を議論する中で、実験室が自ら状態を把握し必要なケアを一括して担うために必要な能力としてSeMという概念の提案に至りました。SeMとは「物資の消費や設備の消耗を伴い、また外乱[用語5]による動作の失敗などの可能性もある環境において、システムが機能を実行できる状態に保持する能力」です。これは、生物の最小単位である細胞が“摂取・排出・代謝”により恒常性を保つ仕組みをヒントにしています(図1)。さらに、従来の自動化ラボに替わる新たな設計思想として、SeMを備えた自動化ラボ「SeM対応ラボ」を提案しました。
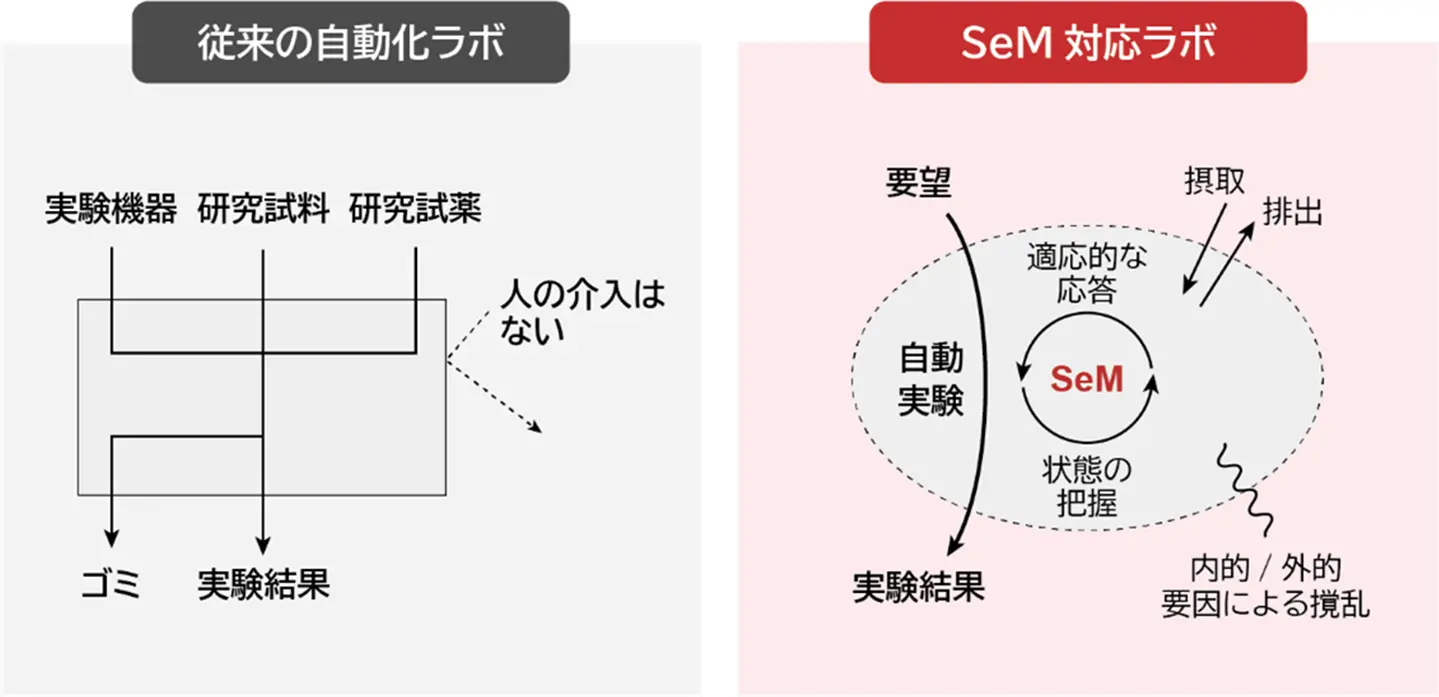
従来の自動化ラボ(左)では「自動化」の範囲とされていなかった実験システムへの試薬・消耗品出入りや、想定外の撹乱(かくらん)に対して、SeM対応ラボ(右)は自身の状態を把握し対応する能力を持つ。
従来の自動化ラボはユーザーの指示を忠実に実行することを目的とし、環境や指示の不完全さに対応できなかったのに対し、SeM対応ラボではユーザーの意図を理解し実験結果を提供することを目的とする、という発想の大転換があります。個別のロボットによって実験操作が自動化された従来の自動化ラボでは、ユーザーは、実験スケジュールから消耗品配置まで事前に把握・調整した上で、ロボット・AIに完璧な指示を与えることができる「完全情報を提供する理想的存在」であることが求められます。一方、ラボ全体が包括的に自動化されるSeM対応ラボでは、ユーザーは「意図を伝え、不完全情報を持つ協力者」として位置付け直され、ユーザーから明示されていない情報はラボ自身が自主的に収集します(図2)。
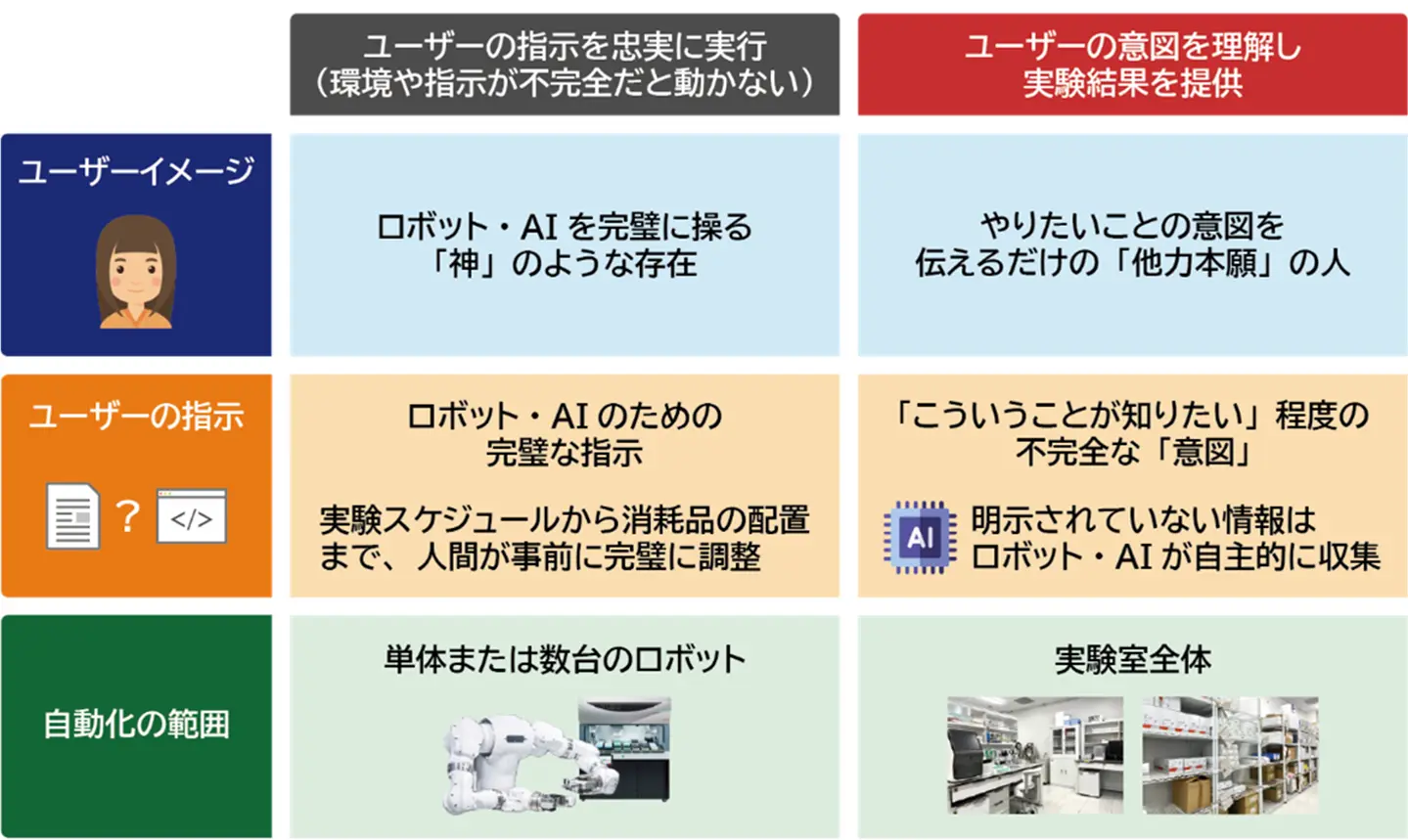
従来の自動化ラボでは、ユーザーによって事前に用意された完璧な指示を忠実に実行することが求められる。一方、SeM対応ラボは、ラボそのものが必要な情報を自分で収集することによりユーザーの意図を実現する。
SeM対応ラボを具体的に設計するための要件として、以下の4項目を抽出しました。
- ユーザーの要求の能動収集:ユーザーが言葉にしきれない条件もシステム側から質問して収集します。
- センサーによるラボの状態の常時把握:ラボの外部や内部からのさまざまな撹乱を前提に、ラボの現在の状態を常に計測・推定します。
- ロボットに対する柔軟なパラメトリック制御[用語6]:事前に指示された動作を再生するのではなく、AIがその場で生成した動作をロボットにさせます。
- 柔軟かつ動的な実験受け付け:実験の実行中であっても、常に新たな実験の要望を受け付けたり、実験計画の変更を依頼したりすることができる状態を維持します。
SeM対応ラボは、AIによる中央制御(中央制御AI)と三つの基幹モジュール(要件管理モジュール、資源管理モジュール、機器管理モジュール)で構成されます(図3)。
- 中央制御AI:三つの基幹モジュールを制御し、センサー情報とユーザー要求を統合して計画―実行を反復しつつ、必要に応じてリソース予約やスケジュール再編成まで自律的に行います。最新の動作生成AI[用語4]の応用を視野に入れています。
- 要件管理モジュール:チャットUI(ユーザーインターフェース)[用語7]などを介し、ユーザーの「やりたいこと」を対話的に深掘りして要件を整理します。
- 資源管理モジュール:画像認識や在庫データベースを用いて、消耗品・試薬やサンプルの状態を常時監視します。
- 機器管理モジュール:パラメトリック指令[用語6]で個々のロボットを制御し、座標ずれや予期せぬ配置変更に対応できるだけの潜在的柔軟性を持ちます。
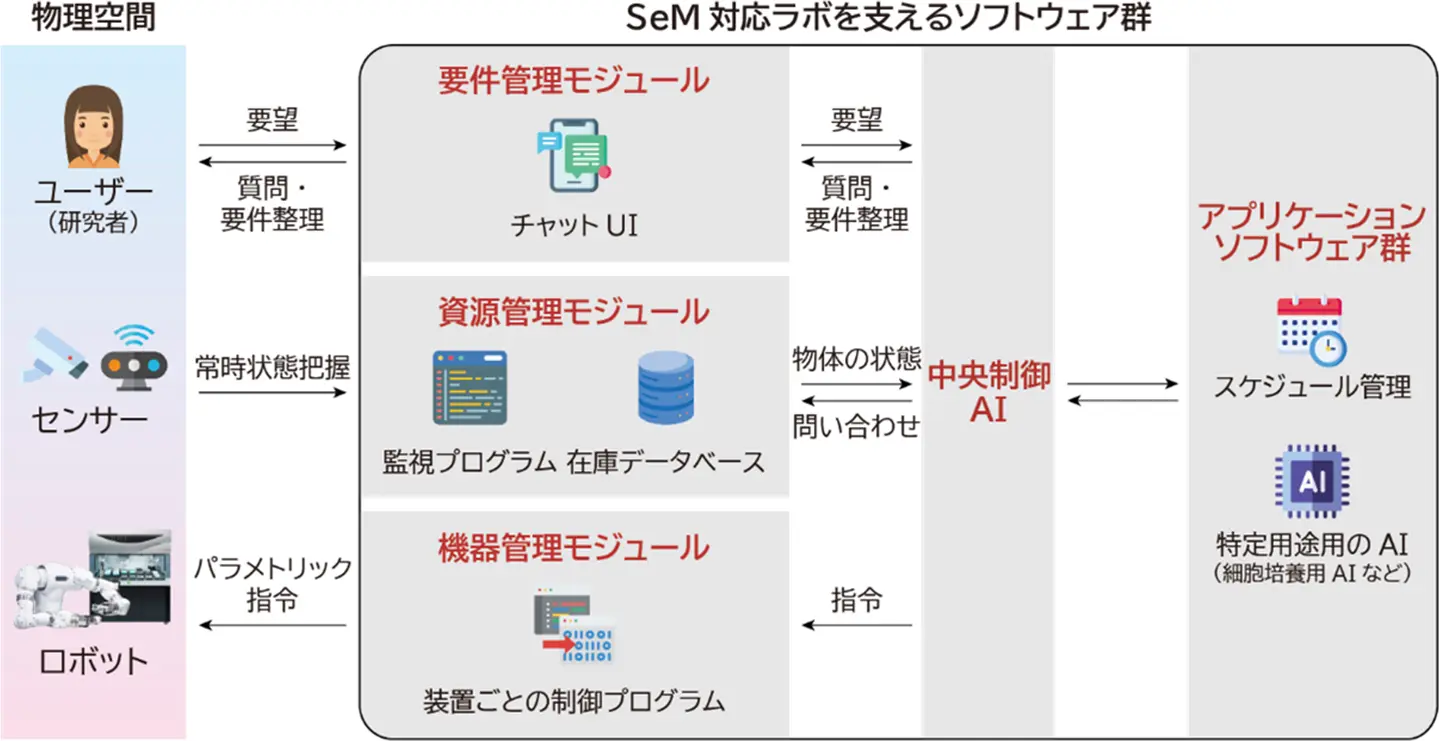
SeM対応ラボは、AIによる中央制御(中央制御AI)と三つの基幹モジュール(要件管理モジュール、資源管理モジュール、機器管理モジュール)で構成される。この構成例では、ユーザー(研究者)はチャット形式で「やりたいこと」をSeM対応ラボと詰めていく。
SeM対応ラボでの自動実験の例として、細胞培養を挙げてみます。ユーザーが要件管理モジュールに「このプレートの各ウェルに培地を2ミリリットル追加して」と入力すると、中央制御AIは以下の一連の手順を自律的に計画・実行します。
- 資源管理モジュールと協調して装置と試薬の空き状況を取得して自動予約
- 機器管理モジュールを介してロボットでプレートと培地チューブを搬送
- 機器管理モジュールを介して自動分注ロボットへ指令を送り、培地の分注を実行
ユーザーは装置予約や資源管理といったケアに関与しません。
なおこれは想定フローであり、本研究ではシステムが実際に稼働した結果ではなく、設計上可能となる手順を例示しています。
SeMを備えた自動化ラボは、センサーとAIでラボの状態を常時監視し、試薬や消耗品を自動補充して人の介入を減らすことができます。そのため、定性的には下記のような利点があります。
- 作業負担の大幅削減:ケアを自動化することで、人手は高レベル指示と最終判断に専念できます。
- 柔軟性の向上:外乱や途中変更が起きても、計画を動的に再構成して継続可能です。
今後の期待
本研究で提示したSeMは、「AI Scientist[用語8]」など計算機内で完結していたAIによる科学研究のサイクルを、物理空間での実験へ拡張するための基盤概念です。SeMを意識した設計により、実験室自身が消耗品補充や装置調整などのケアを自律的に実行できるようにし、研究者を煩雑な管理作業から解放して発想と解析に専念できる環境を整えることができます。また、SeM対応ラボの実現・普及により、創薬では候補化合物の発見サイクルを短縮し、再生医療では多能性幹細胞[用語9]や移植用細胞の長期培養の品質を安定させ、食品・材料開発では多数条件の並列試験時間を短縮できると見込まれます。
用語説明
- [用語1]
- Self-maintainability(SeM、セム):物資の消費や設備の消耗を伴い、また外乱([用語5]参照)による動作の失敗などの可能性もある環境において、システムが機能を実行できる状態に保持する能力。
- [用語2]
- ケア:実験手順の作成、試薬・消耗品の補充、装置予約・スケジュール調整、資源管理、エラー対応など、既存の実験自動化において人間が管理しているタスク。
- [用語3]
- 自動分注機:生命科学実験ではマイクロリットル単位の微量な液体を扱うため、マイクロピペットと、液体を吸排出するための使い捨ての先端部分(ピペットチップ)を用いることが多い。自動分注機は、人間がマイクロピペットを扱う代わりに、大量の分注作業を自動で行う装置。
- [用語4]
- 人工知能(AI)、生成AI:人工知能とは、機械に人間と同様の知能を実現させようとする取り組みやその技術を指す。生成AIは、ユーザーが入力した情報を基に、テキストや画像などのデータを新たに生み出す(生成する)機能を持ったAIの総称。自然言語でテキスト入力された質問に対して回答を自動生成する「ChatGPT」などがある。
- [用語5]
- 外乱:ここでの外乱とは、人為的な操作ミスや、ピペットチップやチューブなど大量消費材のロット間に見られるわずかな寸法誤差に起因するエラーなど。
- [用語6]
- パラメトリック制御、パラメトリック指令:ロボットのアームやツールを動かすときに、位置(x・y・z)と向き(3軸の回転角)をミリメートルや度の具体的な数値(パラメーター)で指定する制御や指示の方法。
- [用語7]
- チャットUI(ユーザーインターフェース):コンピュータのユーザーインターフェースの一つで、情報の提示において、会話(チャット)形式によって指示を送ることができるようにした手法。
- [用語8]
- AI Scientist:Sakana AI株式会社が開発した、論文調査・構想・執筆を行うAIシステム。
Lu, Chris, et al. "The ai scientist: Towards fully automated open-ended scientific discovery." arXiv preprint arXiv:2408.06292(2024). - [用語9]
- 多能性幹細胞:動物の初期胚が持つ、体を構成する全ての種類の体細胞へ分化する能力を多能性という。多能性を持ち、試験管内で培養して無限に増やすことができる細胞を多能性幹細胞という。ES細胞やiPS細胞(人工多能性幹細胞)がその代表例。
論文情報
- 掲載誌:
- Digital Discovery
- タイトル:
- Automating care by self-maintainability for full laboratory automation
- 著者:
- Koji Ochiai, Yuya Tahara-Arai, Akari Kato, Kazunari Kaizu, Hirokazu Kariyazaki, Makoto Umeno, Koichi Takahashi, Genki N. Kanda, Haruka Ozaki
- DOI:
- 10.1039/D5DD00151J
共同研究グループ
理化学研究所 生命機能科学研究センター
バイオコンピューティング研究チーム
- 研究員 落合 幸治
- 上級研究員 海津 一成
-
チームディレクター 高橋恒一
AI生物学研究チーム
- チームディレクター 尾崎 遼
最先端研究プラットフォーム連携(TRIP)事業本部
統合データ・計算科学プログラム 研究DX基盤開発チーム
- 専門技術員 加藤 月
筑波大学 ヒューマニクス学位プログラム
- 大学院生 田原(新井) 悠也
株式会社安川電機 ロボット技術部 バイオメディカルロボット技術課
- 担当課長 仮屋崎 洋和
梅馨堂合同会社
- 代表社員 梅野 真
東京科学大学 総合研究院 難治疾患研究所 ロボット科学分野
- 教授 神田 元紀
研究支援
本研究は、理化学研究所運営費交付金(生命機能科学研究)をはじめとする共同研究グループの各機関内の研究費で実施されるとともに、科学技術振興機構(JST)未来社会創造事業「ロボティックバイオロジーによる生命科学の加速(研究開発代表者:高橋恒一、JPMJMI18G4とJPMJMI20G7)」、同次世代AI人材育成プログラム「学際的次世代AIイノベーション人材育成プロジェクト(研究代表者:鈴木健嗣、JPMJBS2414)」、日本学術振興会(JSPS)科学研究費助成事業若手研究「敵対的生成ネットワークによる自在な発現特異性を有するプロモータ塩基配列の設計(研究代表者:尾崎遼、JP22K17992)」、同学術変革領域研究(A)「グリアブラストによる機能未知グリア細胞の機能予測(研究代表者:尾崎遼、JP23H04149)」、同特別研究員奨励費「細胞培養手技と評価の定量化によるiPS細胞自律培養システムの開発(研究代表者:加藤月、JP22KJ3148)」、同基盤研究(C)「非破壊情報を用いたオルガノイドの最終品質予測(研究代表者:神田元紀、JP23K11820)」による助成を受けて行われました。
発表者
理化学研究所 生命機能科学研究センター
バイオコンピューティング研究チーム
- 研究員 落合幸治
- チームディレクター 高橋 恒一
AI生物学研究チーム
- チームディレクター 尾崎 遼
筑波大学 ヒューマニクス学位プログラム
- 大学院生 田原(新井) 悠也
梅馨堂合同会社
- 代表社員 梅野 真
東京科学大学 総合研究院 難治疾患研究所 ロボット科学分野
- 教授 神田 元紀
発表者のコメント
究極的には人類がいなくなった後も、実験を続けられるようなシステムを実現したいと考えています。SFで人類がいなくなった後も動き続ける施設や宇宙船が描かれることがありますが、現実ではそのようなシステムを実現できていません。生きているうちにそのようなシステムの実現の可能性を可能な限り高めたいと思っています。そのようなシステムが実現できれば、ダイソン・スウォーム(太陽光の効率的な利用方法)やセルフ・レプリケーター(自己複製)への重要な技術ステップになるでしょう。(落合幸治)
われわれがSeM対応ラボを通じて自動化しようとしている部分(ケア)は、現実で実験をするとき、具体的な実験内容にかかわらず必要になる部分でありながら、既存の自動化では無視されてきた部分でした。この部分を自動化することによって初めて、「作業を減らす」のではなく「作業がない」ラボを目指すことができます。また、ソフトウエア開発が、ハードウエア抽象化、タスク管理とリソース管理をOS(基本ソフト)に任せることで効率を上げているように、ケアをSeM対応ラボが担うことで、実験自動化全体の成長効率を向上させることが期待できます。(田原(新井)悠也)
関連リンク
更新履歴
- 2025年8月22日 お問い合わせ先を修正しました。
東京科学大学 総務企画部 広報課
- media@adm.isct.ac.jp
- Tel
- 03-5734-2975
- FAX
- 03-5734-3661