どんな研究?
人やクルマの動きを、街がリアルタイムで理解しているとしたら?そして、事故や混雑を予測し、先に手を打てるとしたら?
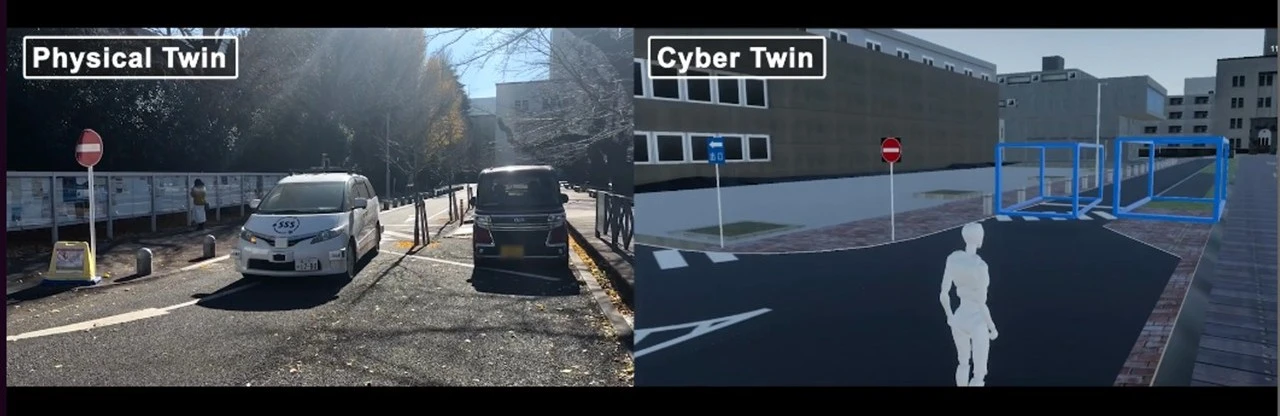
東京科学大学(Science Tokyo)の阪口啓(さかぐち・けい)教授らは、そんな未来の交通システムの実現に取り組んでいます。現在、その仕組みは東京科学大学大岡山キャンパスで実証されています(写真1)。
近年、「デジタルツイン」と呼ばれる技術が注目されています。デジタルツインとは、現実の街や工場をデジタル空間にそっくり再現し、現実で起きている人やモノの動きを画面の中でリアルタイムに見たり、先を予測したりする技術です。工業や農業、物流などで活用が進み、交通分野でも研究が進められてきました。
これまで、街の交通をデータで制御するために、道路に設置したカメラやセンサー、クルマ同士や道路との通信といった技術が積み重ねられてきました。しかし、その多くはコンピュータ上のシミュレーションにとどまっていました。現実の街で「見て→考えて→動かす」までをリアルタイムにつなげた例は、ほとんどありませんでした。
ここが重要
阪口教授らの研究が切り拓いたのは、街とクルマが双方向につながる交通デジタルツインです。ポイントは大きく3つあります。
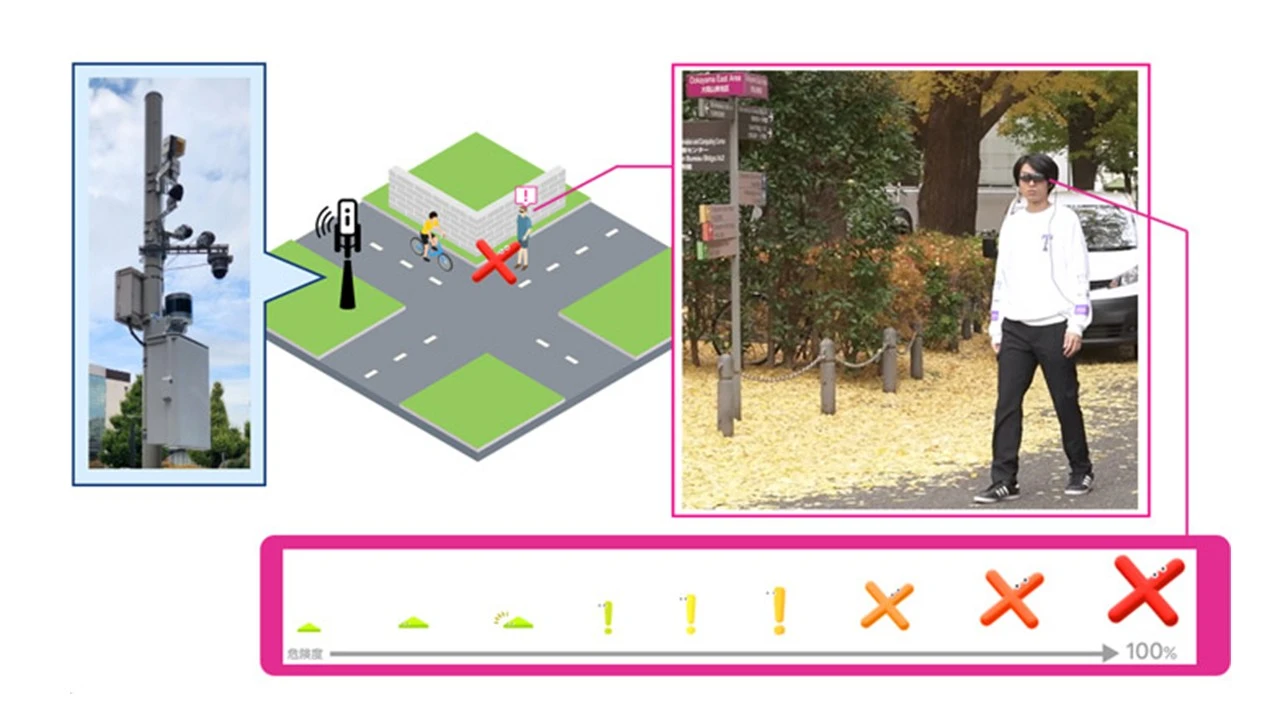
(1)路側インフラ
自動運転の安全性において最大の課題となるのが「死角」です。車のセンサーだけでは見えない部分を補うため、見通しの悪い交差点に路側機を設置しました。この装置にはレーザーセンサーやカメラが搭載されており、交差点に潜む歩行者や自転車の情報を正確に捉え、クルマに伝えます。
(2)リアルタイム・デジタルツイン
現実世界の情報は、一瞬の遅れもなくデジタル空間へ送られます。このシステムでは、交差点付近の情報をわずか10ミリ秒、街全体の情報でも100ミリ秒で処理し、現実世界と同期させています。この高速性によって、衝突回避やルートの最適化を「今、この瞬間」に対応できるようになりました。
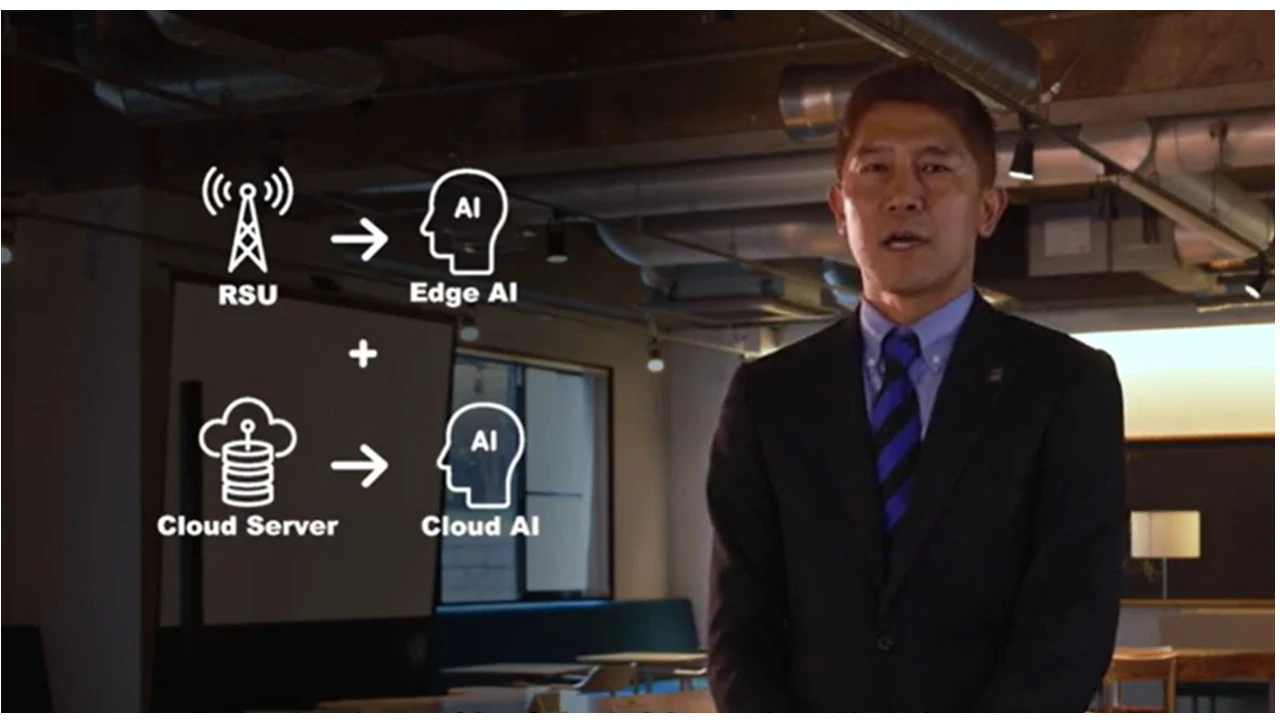
(3)AIによる予測と制御
デジタルツインの大きな特徴は、現状の再現だけでなく「未来の予測」ができる点です。システムは蓄積されたデータをもとに、歩行者の飛び出しや事故のリスクをAIで予測します。この概念は2024年度に既に実証しています。これにより、その場所特有の交通状況やルールに合わせた運転が可能になります。
これらの技術によって、交通デジタルツインは実際の街で活用できる段階に近づいています。渋滞や事故といった交通の根本的な課題に対し、現実的な解決策を示し始めているのです。
今後の展望
阪口教授の研究はさらに進化を続けていきます。たとえば、建物によって電波が遮られる状況をデジタルツイン上で事前に予測し、通信経路を自動で切り替える技術の開発も進んでいます。これにより、通信の途切れを防ぎ、自動運転の信頼性を高めることが期待されています。
また、この技術の応用は交通分野にとどまりません。阪口教授は、デジタルツインとヒューマノイド(人型ロボット)が連携する未来も見据えています。一つの「知能」がデジタル空間を通じて様々なロボットや機械を動かし、家事、移動、工場作業、介護などを担うようになるかもしれません。こうした仕組みは、労働力不足といった社会問題の解決にもつながると期待されています。
研究者のひとこと
クルマが賢くなるだけでなく、街そのものが一緒に考える。そんな交通のかたちを、現実の世界で示せたことが大きな一歩です。
(阪口啓:東京科学大学 工学院 電気電子系 教授)
この研究をもっと詳しく知る

「みんなの科学ニュース」でほかの研究を知る
「みんなの科学ニュース」は、Science Tokyoの最先端の科学研究と未来につながる取り組みや可能性を紹介しています。

お問い合わせ
研究支援窓口