「水中ロボットコンベンションin JAMSTEC 2025」が8月23日、24日の2日間、神奈川県横須賀市の国立研究法人 海洋研究開発機構(JAMSTEC)」横須賀本部で開かれ、東京科学大学(Science Tokyo)の公認サークルであるロボット技術研究会(以下、ロ技研)の水中ロボットチーム、アクア研から「A-Quadken」「AquaUMIUSI」の2チームが出場しました。
「A-Quadken」がフリー部門で優勝、「AquaUMIUSI」がビデオ部門で3位入賞を果たしました。


水中ロボットコンベンションは、自作の水中ロボットによる競技会やプレゼンテーションを通じて参加者の交流の輪を広げるとともに、工学的知識・技術を駆使して現実的な課題に挑む機会を提供し、社会に向けて水中ロボット研究の楽しさと重要性をアピールすることを目的としています。
参加者は、技術内容やオリジナリティを競うフリー部門、自動操縦で水中に設置された風船割りを行うAIチャレンジ部門、ロボットの技術内容やオリジナリティ、演技などをまとめたビデオにより競うビデオ部門、中高生向けのジュニア部門の4部門に分かれて競技を行います。
今年度ロ技研から出場した競技の詳細は以下の通りです。
フリー部門優勝の「A-Quadken」
フリー部門は、ワークショップでのプレゼン点、自由演技の競技点がそれぞれ50点ずつ、計100点満点で競います。今年度は17チームの応募があり、書類選考を通過した8チームが出場しました。
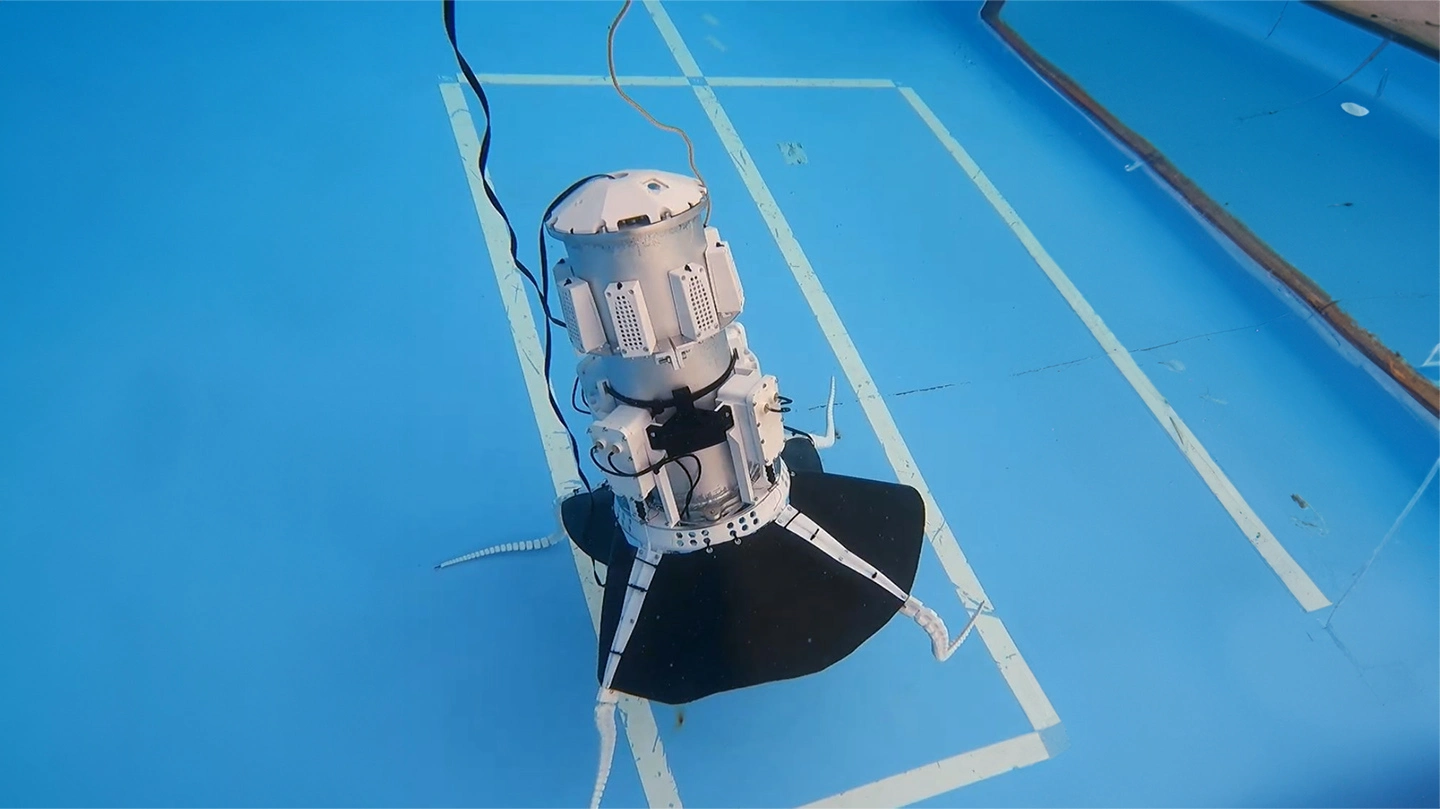
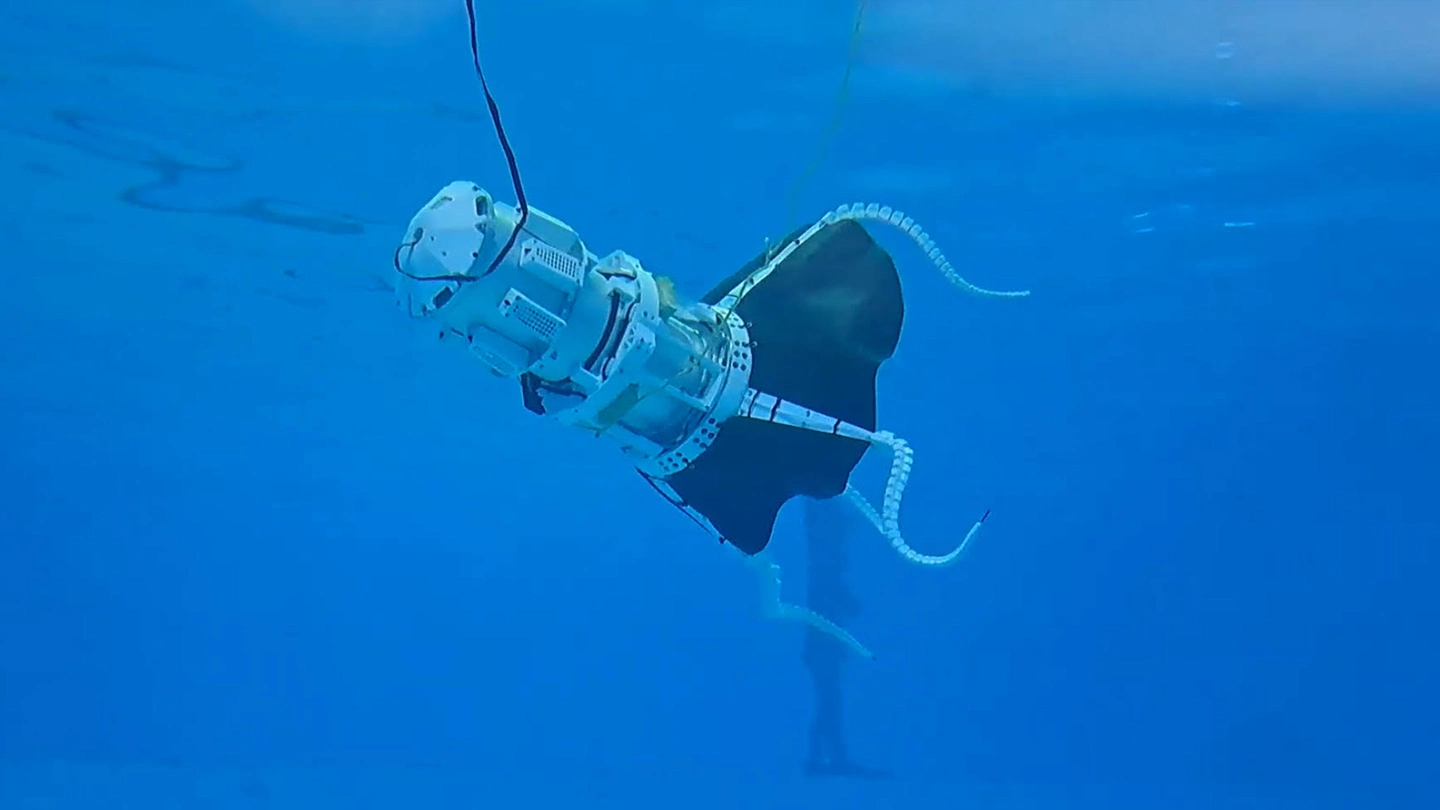
QuadKenは、タコなどの頭足類に着想を得て製作された水中ロボットで、頭部にあるバラストタンク、4本の脚に張られた膜と中央部にあるスラスタを併用することで移動します。
バラストタンクとは、外部の水を機体に取り込むことで浮力を調整する装置で、浮力を利用するため、スラスタに比べて下方向や上方向の運動を効率的に行えるのが特徴です。
QuadKenにはバラストタンクが4機搭載されており、これによって、機体の浮沈、ピッチ方向の回転制御に加え、機体の中の重心と浮心の位置を調整することでロール方向の回転も制御できるようになっています。

本機体の主な動きは膜による操舵とスラスタによる推進を組み合わせたもので、脚を動かして膜の形状を変化させ、水から受ける抵抗の向きを変えて方向転換を行います。スラスタによる推力補助と合わせて素早くダイナミックな動きが実現できます。
また、膜で水をかくことによって推進力を得られるのも強みです。例えば池などで、藻を巻き込んだり土を巻き上げてしまうなど、スラスタを利用することが難しい場面においては膜のみでの移動を行うといった、環境に応じた移動方法の選択が可能となっています。
QuadKenは従来のスラスタを用いる水中ロボット、生物を模倣したヒレなどを用いるロボット両方の特性を併せ持つロボットです。スラスタによる高出力な推進と、ヒレによる高効率で環境に影響を与えにくい推進を、環境や機体の状況に応じて切り替えたり併用したりできる点が大きな特徴です。
回転対称性の高い本機体を直感的に動かせるようにするため、加速度センサーなどを利用し、機体をコントローラによって直感的に操作できるようにしています。
大会では、こうした動きの柔軟性、操作性の高さによる安定したダイナミックな動きや、初日のプレゼンテーションでの発表内容などが評価され、優勝することができました。
ビデオ部門で3位入賞の「AquaUMIUSI」


UMIUSIは、アジマススラスタという推力偏向が可能なスラスタを4機搭載する機体で、従来の水中ロボットに比べて移動の際により多くのスラスタを利用することができるのが特徴です。複数のスラスタの推力を組み合わせて動くことで、高出力、高効率で高い自由度の動きができるようになっています。
本機体は昨年度に製作されたもので、今年度はそれをベースにスラスタ部分や回路系統などに大幅な改良を加えてビデオ部門に出場しました。
従来の機体では、利用していたスラスタの機構が複雑で壊れやすく、ブラシレスモーターの駆動に利用していたESC(電子速度コントローラ)が使いづらかったので、厳密な回転の制御ができないといった問題がありました。本年度は、こうした問題を解決するため、スラスタ部分の機構の簡易化を行うとともに、モーター駆動用ESCを自作し、ベクトル制御を利用する高効率なものにしました。また、配線を減らすため、ESCそれぞれで処理を完結させ、メインのボードとCAN通信を利用して接続できるようにしたことで、配線の削減や小型化に成功しました。これに加えて、ESCそれぞれからサーボモータを駆動したり、回転数などに応じて色の変わる状態認識用のLEDを制御できるようになり、別の機体にも利用可能なモジュール化とマイコンボードの削減なども達成できました。
本機体はまだ開発途上ではありますが、難易度の高い試みを実践してスラスタやESCの動作、通信などに成功できたことなどが評価され、3位入賞を果たしました。
チームA-Quadkenのコメント
機械班 高角怜志さん(工学院機械系 学士課程3年)
私は防水容器の製作、機体の脚部やスラスタ部の設計などを行いました。防水容器の大きさ不足や実験でのアクチュエータ部分への浸水、機体の制御など、苦労した点は多くありましたが、チームメンバーと協力して機体を完成させることができました。本番の演技では2回とも当初の想定通りに機体を動かすことができ、アクア研として初めてJAMSTECの水中ロボットコンベンションで優勝することができたことをとてもうれしく思います。ご協力いただいた先輩方や、このような機会を用意してくださった大会関係者の皆様に、この場をお借りして厚く御礼申し上げます。
チームAquaUMIUSIのコメント
回路班 井川慶紀さん(工学院機械系 学士課程2年)
回路班でESCの開発等を行なっていました。メンバーが4人しかおらず、非常に厳しい進捗でしたが、なんとか入賞することができうれしく思います。メンバーにはかなり無理なことを頼んだと内心反省しています。自分を含む2年生にとってはこれが初めてのJAMSTECの大会で、他チームとの交流の中で刺激を受けました。今回の結果を糧に、来年はさらなる成果を出したいと思います。
BS日テレで放送予定の「ガリレオX」において、優勝チーム「A-Quadken」が紹介されます。
ガリレオX 「水中ロボットで見る世界 未知の領域に広がる活躍の可能性」
本放送:2025年10月2日(木)22:30~22:56
再放送:2025年10月9日(木)22:30~22:56
関連リンク
お問い合わせ
- 備考
- ロボット技術研究会アクア研
Email rogy.aqua@gmail.com